![]()
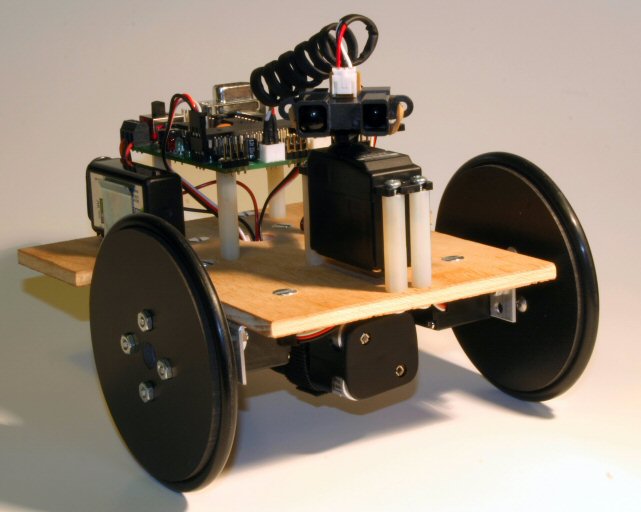
"DE Robot 02" aka: Debot2, Der2. - Design to meet DPRG "Type B" specifications, 15cm * 15cm and 1 Kilogram or less.
Main purpose will be to test wheel encoders for odometry and to test proximity detector on a turret for obstacle avoidance. Building steps and pictures are chronicled in my robot journal.
 |
 |
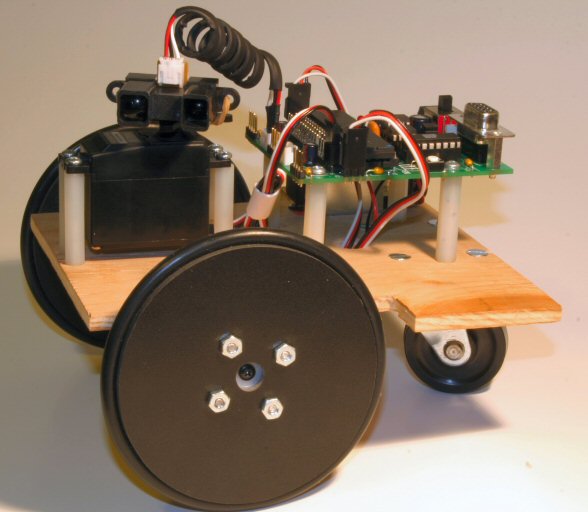 |
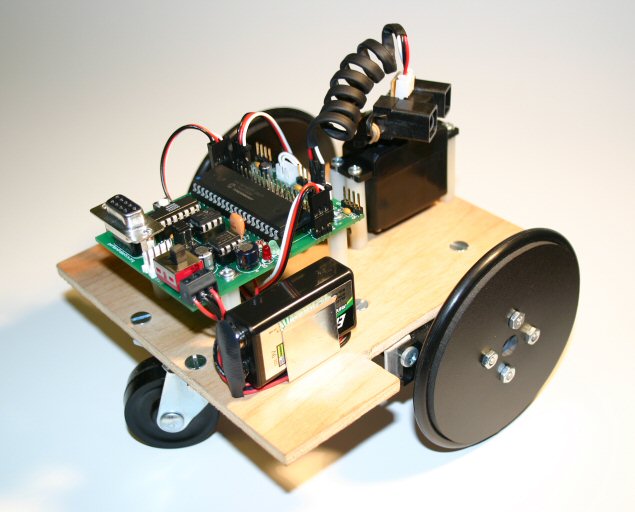
| Front Right | Back Right | Front Left |
Detail Pictures
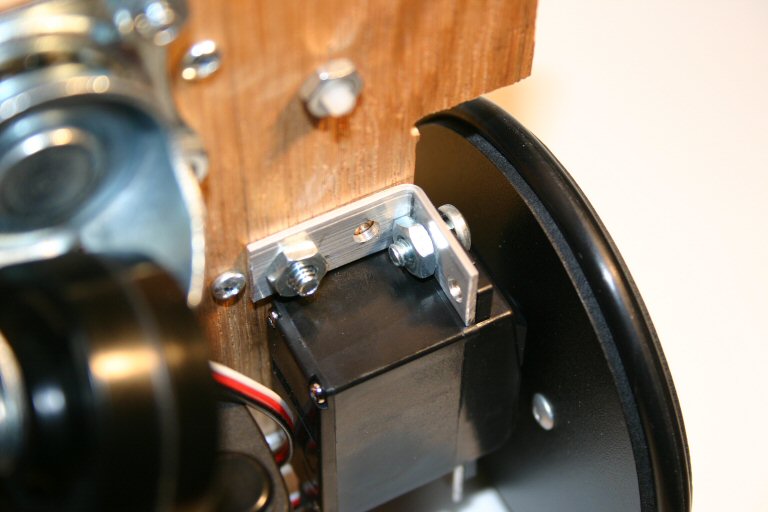 |
Hand made servo bracket |
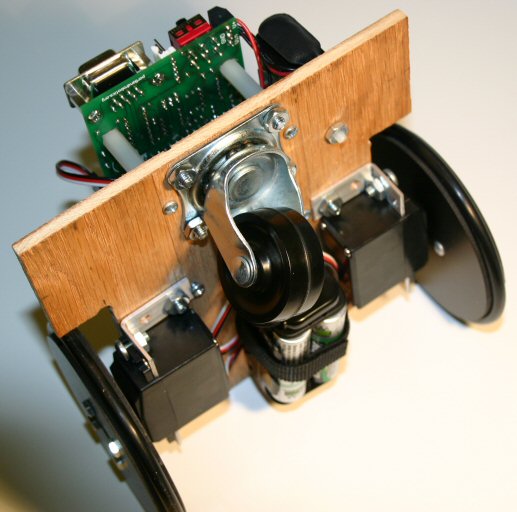 |
Underside details - Furniture caster wheel. Velcro battery strap. Velcro held on by same screws that hold turret servo stand offs. |
 |
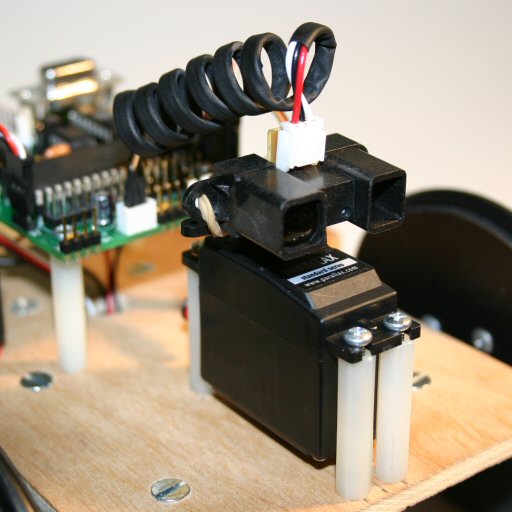
Turret |
 |
Mark 3 Controller Connections - Turret servo connected
to J1 pins 2, 4, and 6, perfectly. Nylon bolt in 9V battery clip. |
 |
Closer picture of turret. |
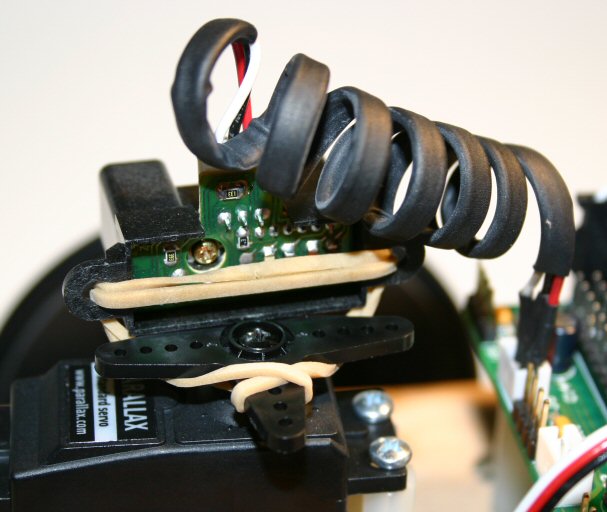 |
Wire Harness - shrink tubing wound around a pencil and heated. Distance sensor test fitted using rubber bands. Worked great so I kept it. |
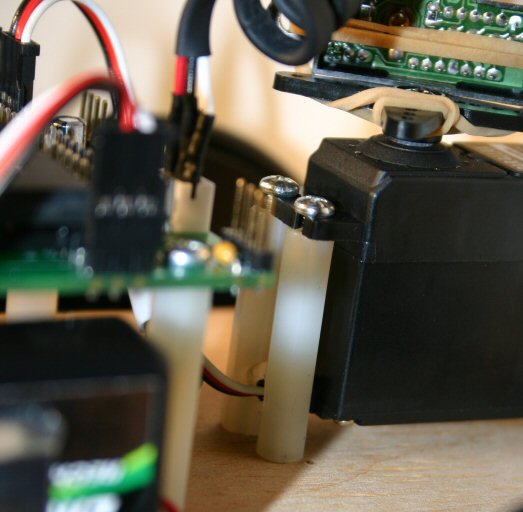 |
Modified Standoffs to not pinch servo lines. Marked line where lines come out of servo. Taped standoffs together and drilled where they met creating two near perfect half moons. |
 |
Modified Standoffs Closer. Cable bundle uses small plastic tube with seam split (split not shown). |
If you have any questions or comments about this page please email me at: debots_replacethis_dinkdaze.org with at sign.